High Dimensional Probability and Concentration of Measure
Machine Learning Fundamentals for Economists
Overview
Summary
- High-dimensional spaces exhibit counterintuitive geometric and probabilistic properties
- Key phenomena:
- Curse of dimensionality: most volume is in corners, uniform sampling fails
- Concentration of measure: functions of many variables are “essentially constant”
- Johnson-Lindenstrauss: random projections preserve distances
- Near-orthogonality: random vectors are almost perpendicular
- Random algorithms: leverage concentration to provide probabilistic error guarantees
- These concepts are foundational for understanding why ML methods work
- Applications to solving structural economic models covered in subsequent lecture
References
High-Dimensional Geometry
Hypercubes Are All Corners
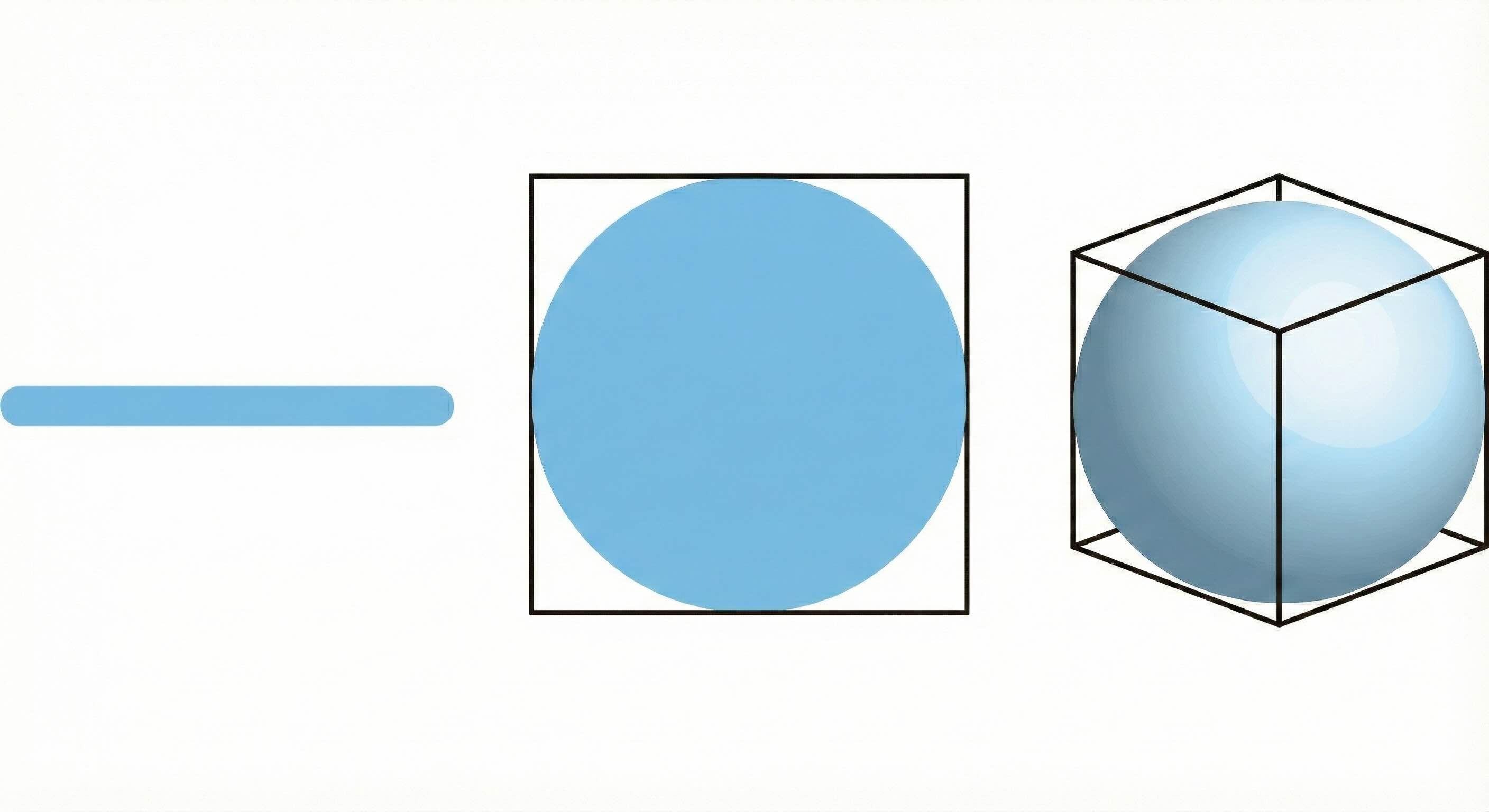
- Counter-intuitive geometry: in high-dimensions, hypercubes are all corners
- Consider volume within a 1/2 radius of the origin in a hypercube \([-1/2,1/2]^N\)
- Hypersphere inscribed in hypercube, touching all “faces” for all \(N\)
- \(V(1) = 1\). The origin is close to every point on the line segment.
- \(V(2) = \pi (1/2)^2, V(3) = \frac{4}{3} \pi (1/2)^3, V(10)\approx 0.002, V(50) = 1.536743\times 10^{-28}\)
![]()
A High-Dimensional Space is a Lonely Place (Bernhard Schölkopf)
- Any \(X\) (e.g., steady-state) becomes increasingly distant from other regions of \({\mathcal{X}}\)
- Approximating functions with a grid or sampled on uniform \([X_{\min}, X_{\max}]^N\) distribution
- Almost all of the volume in high-dimensional spaces is where you do not need it
- i.e., not only does the num grid points, \(M\), need to increase exponentially with \(N\), but asymptotically almost every point is wasted for many applications
- Calculating numerical expectations has similar issues (see Betancourt (2018))
- How could these possibly generalize from \({\mathcal{D}}\) to \({\mathcal{X}}\)? Is it really so hopeless?
- ML and deep learning methods succeed in approximating functions on even richer spaces (e.g., images, videos, and NLP). Same with Bayesian methods like HMC.
- Krusell-Smith approximations work very well in practice for many problems
High Dimensional Probability
Minimizing Uniform vs. Population Risk
Uniform bounds on Errors: impossible in general without exponential cost in \(N\) \[ \min_{f\in {\mathcal{F}}}\sup_{(x,y) \in {\mathcal{X}}} \left[(f(x) - y)^2\right] \]
Statistical learning: minimizes regions weighted by a distribution \(\mu^*\)
\[ \min_{f \in {\mathcal{F}}} \mathbb{E}_{(x,y) \sim \mu^*}\left[(f(x) - y)^2\right] \]
- Helps if probability distribution is “concentrated” in specific regions of \({\mathcal{X}}\)
- Doesn’t help doesn’t if \(\mu^*\) is itself “all corners” (e.g., uniformly distributed)
- Challenging if “worst case” matters (e.g., game with unconstrained best-responses)
Concentration of Measure Phenomenon
“A random variable that depends in a Lipschitz way on many independent variables (but not too much on any of them) is essentially constant.” (Ledoux (2001))
- i.e., functions of high-dimensional random variables have small variance if
- The correlation between individual random variables are controlled
- Lipshitz-like: If no single coordinate dominates, the function “averages out”
- Non-asymptotic bounds that improve with dimension (i.e., larger \(N\) is better, not worse)
- While geometry in \({\mathcal{X}}\) may be subject to a curse of dimensionality, functions of random variables on that space can become increasingly predictable
Example: Norm of Isotropic Gaussian
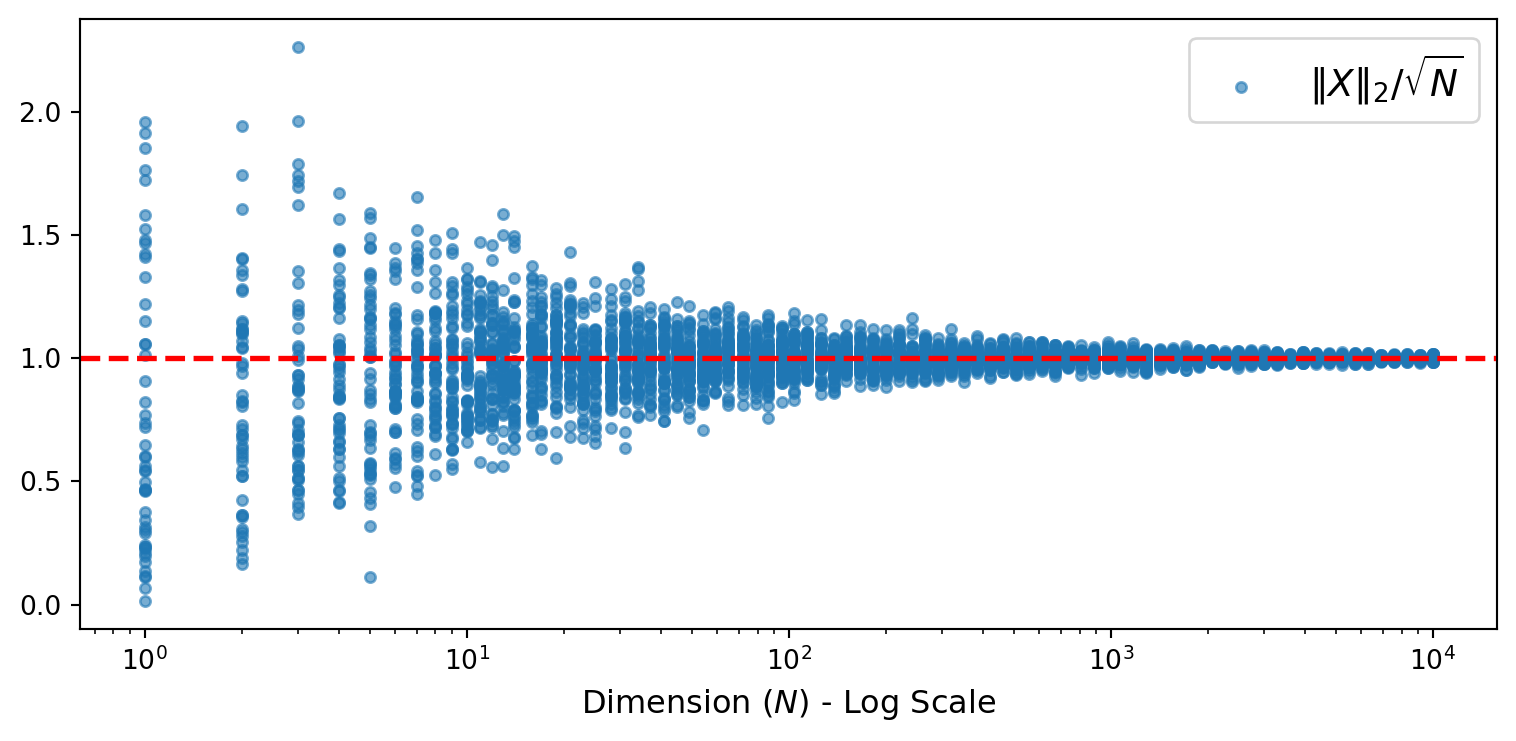
- Let \(X \sim \mathcal{N}(0_N, I_N)\) be an \(N\)-dimensional standard Gaussian
- Consider \(f(X) = \|X\|_2 / \sqrt{N}\)
- Can prove the concentration bound:
\[ {\mathbb{P}_{}\left( {|f(X) - 1| \geq \epsilon} \right)} \leq \exp(-c \epsilon^2 N) \]
for some constant \(c > 0\) independent of \(N\).
- The ratio \(\|X\|_2 / \sqrt{N}\) becomes increasingly predictable as \(N\) grows
- Convergence is exponentially fast in \(N\). Blessing, not curse, of dimensionality!
Visualization of Concentration of Norms
- 50 draws of \(X \sim \mathcal{N}(0_N, I_N)\) for each dimension \(N\)
- As \(N\) increases, all samples concentrate tightly around 1
The Soap Bubble Effect
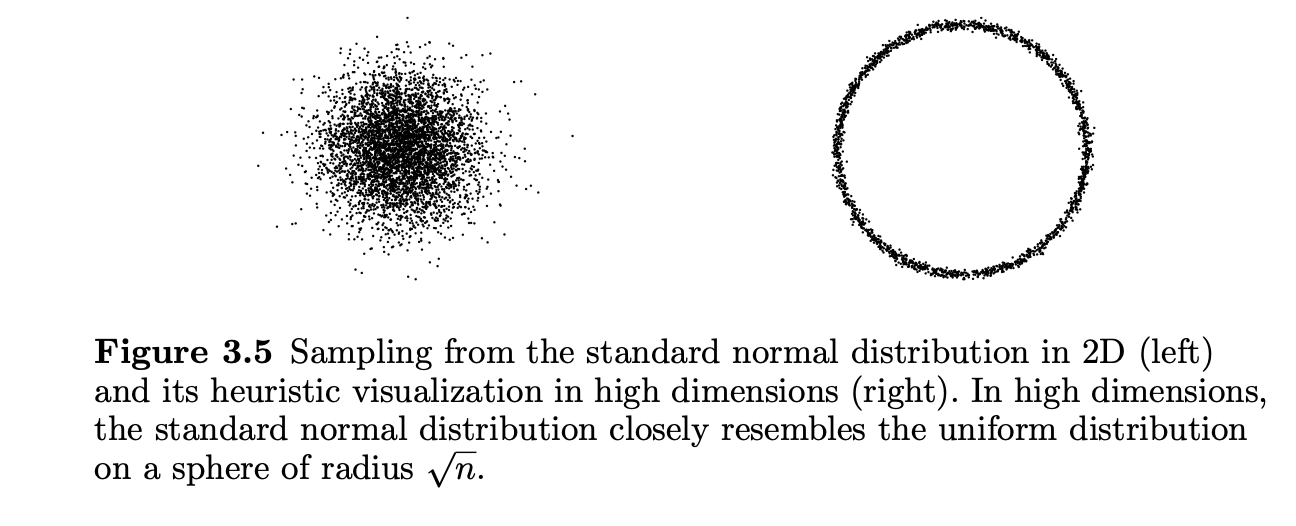
From Vershynin (2018): 2D Gaussian samples vs. random 2D projections of high-dimensional samples
- 2D Gaussians are distributed around the origin with an intuitive peak
- High-dim Gaussians are distributed roughly uniformly on a spherical shell of radius \(\sqrt{N}\)
- Points are nowhere near the mode/mean/median (i.e., \(X = 0_N\))
Lipschitz Concentration (Informal)
Definition: Lipschitz Function
A function \(f: {\mathbb{R}}^N \to {\mathbb{R}}\) is \(L\)-Lipschitz if for all \(x, y \in {\mathbb{R}}^N\):
\[ |f(x) - f(y)| \leq L \|x - y\|_2 \]
- Lipschitz functions cannot change too fast
- For \(f(x) = \|x\|_2\), we have \(L = 1\)
- Key insight: Lipschitz functions of Gaussians concentrate around their mean
- Can be extended to non-Lipschitz functions bounding expected gradients, etc.
Gaussian Concentration Inequality
Proposition: Concentration for Lipschitz Functions of Gaussians
Let \(X \sim \mathcal{N}(0_N, I_N)\) and let \(f: {\mathbb{R}}^N \to {\mathbb{R}}\) be \(L\)-Lipschitz. Then:
\[ {\mathbb{P}_{}\left( {|f(X) - \mathbb{E}[f(X)]| \geq t} \right)} \leq 2\exp\left(-\frac{t^2}{2L^2}\right) \]
- The bound is independent of dimension \(N\)!
- For normalized functions (gradient \(\mathrm{O}(1/\sqrt{N})\)), concentration improves with \(N\)
- i.e., approximate average output of an industry vs. total output of an industry
- Many extensions: bounded differences, sub-Gaussian tails, etc. (Boucheron, Lugosi, and Massart (2013))
When Concentration Fails
Breaking Concentration: Three Mechanisms
The Gaussian concentration inequality requires:
- Isotropic covariance: \(X \sim \mathcal{N}(0, I_N)\)
- Lipschitz function: bounded gradient \(\|\nabla f\| \leq L\)
- Distributed dependence: function doesn’t rely too heavily on any single coordinate
Violating (1) or (2) can break concentration, while violating (3) prevents improvement with dimension.
Operator Norm and Spectral Radius
Definition: Operator Norm and Spectral Radius
The operator norm (spectral norm) of \(A \in {\mathbb{R}}^{N \times N}\):
\[ {\left\| {A} \right\|_{\mathrm{op}}} = \sup_{x \neq 0} \frac{\|Ax\|_2}{\|x\|_2} \]
The spectral radius of \(A\):
\[ {\varrho\!\left( {A} \right)} = \max_i |\lambda_i(A)| \]
- In general: \({\varrho\!\left( {A} \right)} \leq {\left\| {A} \right\|_{\mathrm{op}}}\)
- For symmetric PSD matrices (e.g., covariance \(\Sigma\)): \({\left\| {\Sigma} \right\|_{\mathrm{op}}} = {\varrho\!\left( {\Sigma} \right)} = \lambda_{\max}(\Sigma)\)
- Concentration bounds depend on \({\varrho\!\left( {\Sigma} \right)}\): larger spectral radius → weaker concentration
Non-Isotropic Gaussians: The Setup
Consider \(Z \sim \mathcal{N}(0, \Sigma)\) with general covariance \(\Sigma\)
Write \(Z = \Sigma^{1/2} X\) where \(X \sim \mathcal{N}(0, I_N)\)
For an \(L\)-Lipschitz function \(f\), define \(g(X) = f(\Sigma^{1/2} X)\)
\[ |g(x) - g(y)| = |f(\Sigma^{1/2} x) - f(\Sigma^{1/2} y)| \leq L \|\Sigma^{1/2}(x-y)\|_2 \]
Using operator norm: \(\|\Sigma^{1/2}(x-y)\|_2 \leq {\left\| {\Sigma^{1/2}} \right\|_{\mathrm{op}}} \|x-y\|_2 = \sqrt{{\varrho\!\left( {\Sigma} \right)}} \|x-y\|_2\)
Concentration with Non-Isotropic Gaussian
Proposition: Non-Isotropic Gaussian Concentration
For \(Z \sim \mathcal{N}(0, \Sigma)\) and \(f: {\mathbb{R}}^N \to {\mathbb{R}}\) that is \(L\)-Lipschitz:
\[ {\mathbb{P}_{}\left( {|f(Z) - \mathbb{E}[f(Z)]| \geq t} \right)} \leq 2\exp\left(-\frac{t^2}{2L^2 {\varrho\!\left( {\Sigma} \right)}}\right) \]
- The effective Lipschitz constant is \(L \sqrt{{\varrho\!\left( {\Sigma} \right)}}\)
- Concentration depends on the spectral radius of the covariance
- If \({\varrho\!\left( {\Sigma} \right)}\) grows with \(N\), concentration can degrade with dimension
Perfect Correlation Breaks Concentration
- Consider equicorrelation: \(\Sigma = \sigma^2\left((1-\rho)I_N + \rho \mathbf{1}_N \mathbf{1}_N^\top\right)\)
- Diagonal: \(\Sigma_{ii} = \sigma^2\) (each variable has variance \(\sigma^2\))
- Off-diagonal: \(\Sigma_{ij} = \sigma^2 \rho\) (correlation \(\rho\) between all pairs)
- Eigenvalues:
- \(\sigma^2(1-\rho)\) with multiplicity \(N-1\)
- \(\sigma^2(1 + (N-1)\rho)\) with multiplicity \(1\)
- As \(\rho \to 1\): \({\varrho\!\left( {\Sigma} \right)} \to \sigma^2 N\)
Perfect Correlation: The Bound Degrades
With \({\varrho\!\left( {\Sigma} \right)} = \sigma^2 N\), the concentration bound becomes:
\[ {\mathbb{P}_{}\left( {|f(Z) - \mathbb{E}[f(Z)]| \geq t} \right)} \leq 2\exp\left(-\frac{t^2}{2L^2 {\varrho\!\left( {\Sigma} \right)}}\right) = 2\exp\left(-\frac{t^2}{2L^2 \sigma^2 N}\right) \]
Concentration gets worse with dimension!
Intuition: With perfect correlation, all \(N\) variables move together
- Effectively have only one degree of freedom, not \(N\)
- No “averaging out” across independent sources of variation
This is why independence (or weak dependence) is crucial for concentration
Functions of Single Coordinates
Consider \(f(X) = X_1\) with \(X \sim \mathcal{N}(0, I_N)\)
Gradient: \(\nabla f = (1, 0, \ldots, 0)^\top\), so \(L = 1\)
Concentration bound:
\[ {\mathbb{P}_{}\left( {|X_1| \geq t} \right)} \leq 2e^{-t^2/2} \]
No improvement with dimension! The bound is the same for \(N = 10\) or \(N = 10{,}000\)
\(X_1 \sim \mathcal{N}(0, 1)\) regardless of \(N\)—adding more coordinates doesn’t help
Contrast: Sample Mean Concentrates
Compare with \(\bar{X} = \frac{1}{N}\sum_{i=1}^N X_i\)
Gradient: \(\nabla \bar{X} = \frac{1}{N}(1, 1, \ldots, 1)^\top\)
Lipschitz constant: \(L = \|\nabla \bar{X}\|_2 = \frac{1}{\sqrt{N}}\)
Concentration bound:
\[ {\mathbb{P}_{}\left( {|\bar{X}| \geq t} \right)} \leq 2\exp\left(-\frac{t^2 N}{2}\right) \]
Improves with dimension! Exponentially tighter as \(N\) grows
\(\bar{X} \sim \mathcal{N}(0, 1/N)\): variance shrinks as \(1/N\)
Key Insight: Coordinate Dependence
When Does Concentration Improve with \(N\)?
Concentration improves with dimension when no single coordinate dominates:
- \(\partial f / \partial X_i = \mathrm{O}(1/\sqrt{N})\) for all \(i\) → concentration improves
- \(\partial f / \partial X_1 = \mathrm{O}(1)\), others \(\approx 0\) → no improvement
- Intuition: The function must “average out” across many coordinates
- Functions that depend on all coordinates roughly equally benefit from high dimensions
- Functions concentrated on few coordinates behave like low-dimensional problems
Concentration is a Double-Edged Sword
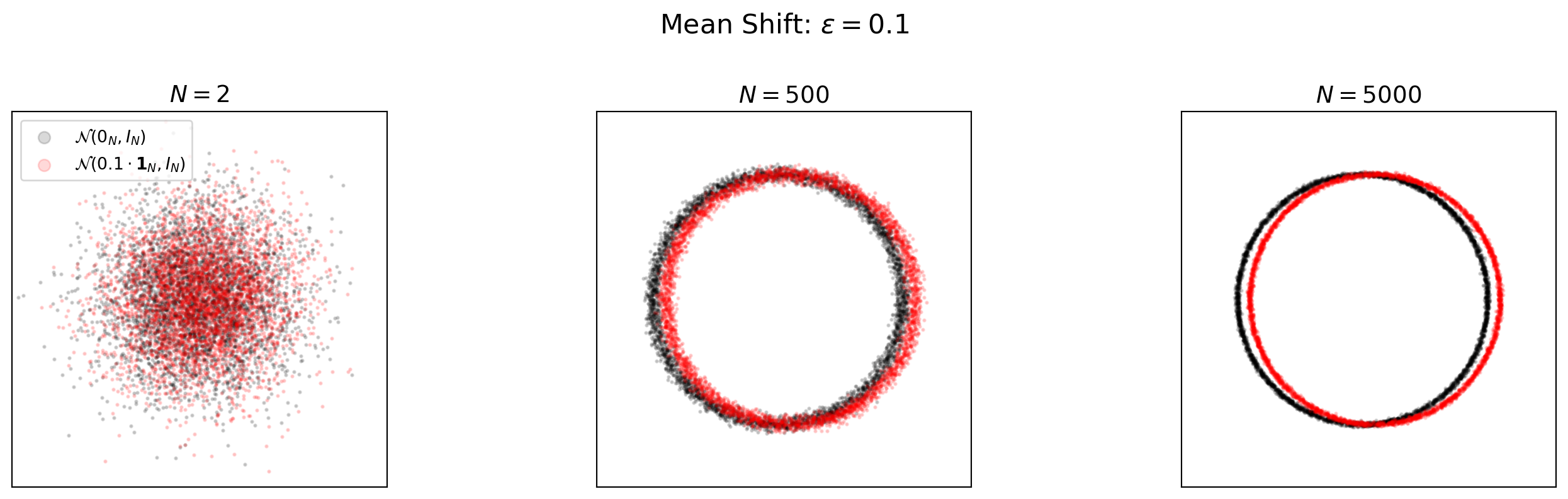
Shifted Mean: Increasing Separation
- Consider two distributions: \(\mathcal{N}(0_N, I_N)\) vs. \(\mathcal{N}(\epsilon \cdot \mathbf{1}_N, I_N)\)
- The Euclidean distance between means is \(\epsilon \sqrt{N}\)
- As \(N\) grows, distributions separate completely despite small per-coordinate shift
- Showing random 2D projections from \(4000\) sampled points for visualization
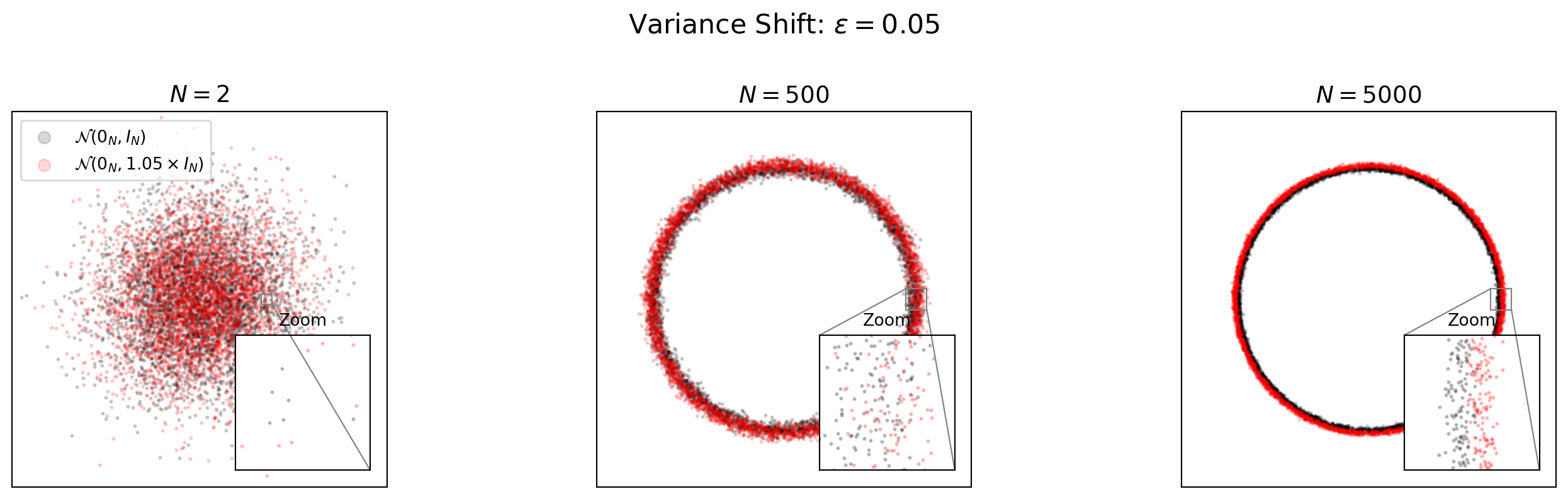
Variance Shift: Dangerous and Difficult to Detect
- Consider: \(\mathcal{N}(0_N, I_N)\) vs. \(\mathcal{N}(0_N, (1 + \epsilon) I_N)\)
- A 5% variance increase causes complete separation in high dimensions
- Sampling more points from a slightly misspecified distribution may make statistical learning worse, not better.
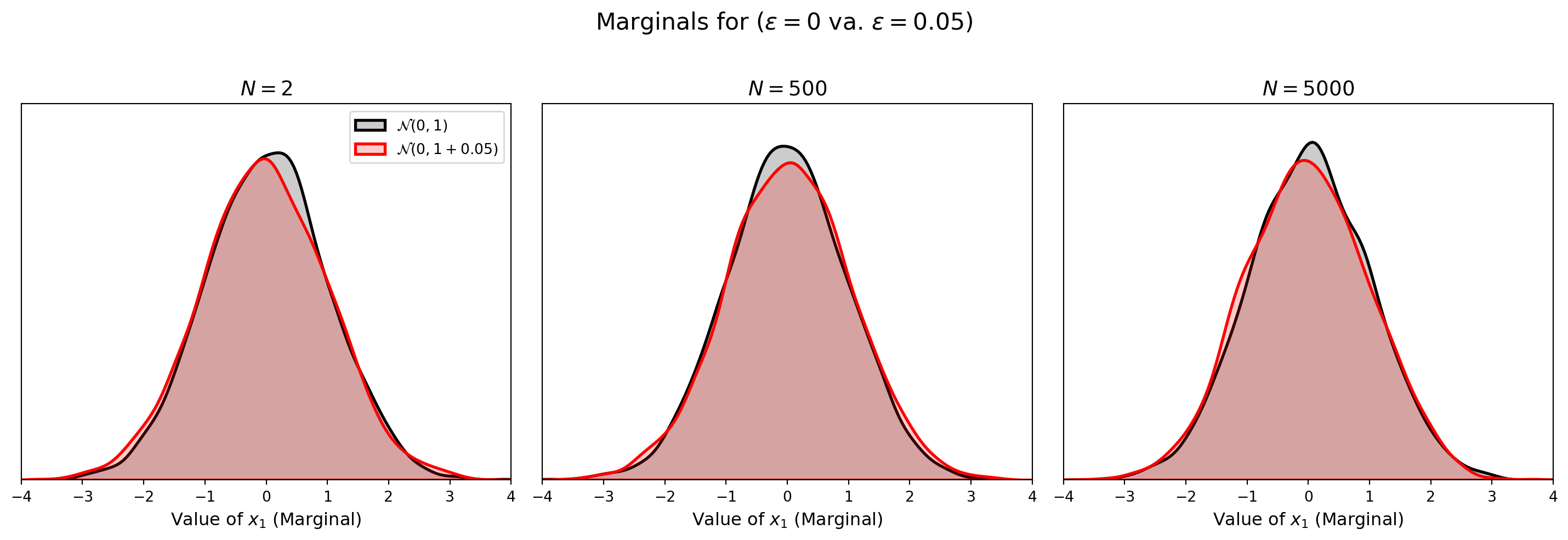
Marginals Are Deceptive
- With the shifted variance, the marginal distribution of any single coordinate is similar for both distributions
- Showing the empirical 1D marginals of \(x_1\) from \(4000\) samples
- Recall that the joint distributions are completely separated in high dimensions
Key Insight: Double-Edged Sword
- Within a distribution: Concentration is helpful
- Functions become predictable
- Few samples may suffice for accurate estimation
- Across distributions: Concentration is dangerous
- Small changes in distribution parameters cause complete separation
- A model trained on one distribution may fail entirely on a slightly different one
- Implication for learning:
- Must ensure training distribution \({\mathcal{D}}\sim \mu^*\) matches test distribution
- “Out of distribution” generalization is fundamentally hard and requires changes to the training algorithm.
- Representation learning becomes especially important. e.g., if functions were summarized well-approximated by mean and variance they could be learned and generalize well.
Random Algorithms in High Dimensions
Motivation
- High-dimensional economic models often involve objects that are:
- Too large to store explicitly (e.g., large design or transition matrices)
- Too costly to evaluate deterministically (e.g., integrals over \(\mathbb{R}^{100}\) or OLS with two-way fixed effects with millions of observations)
- Random algorithms use carefully designed randomness to:
- Control approximation error probabilistically
- Replace exponential complexity with polynomial or logarithmic complexity
- These are not heuristics—they satisfy non-asymptotic error bounds:
- \(\mathbb{P}(|\text{Error}| > \epsilon) \le \delta\) where \(\delta\) includes functions of the number of samples, lipshitz constants, etc. Often decreasing, rather than increasing, in dimension \(N\)
- Justified by concentration of measure
Johnson–Lindenstrauss as a Guiding Principle
Proposition: Johnson–Lindenstrauss (JL) Lemma
For any \(\epsilon \in (0,1)\), \(\delta \in (0,1)\), and points \(\{x_1,\dots,x_M\}\subset\mathbb{R}^N\), let \(R \in \mathbb{R}^{k \times N}\) be a random matrix (e.g., Gaussian or Rademacher entries) scaled by \(1/\sqrt{k}\). If
\[ k = \mathrm{O}\left(\epsilon^{-2} \log(M^2/\delta)\right), \]
then with probability at least \(1-\delta\), for all \(i,j\):
\[ (1-\epsilon)\|x_i-x_j\|_2^2 \;\le\; \|R x_i - R x_j\|_2^2 \;\le\; (1+\epsilon)\|x_i-x_j\|_2^2. \]
- Key insight: Randomness can preserve structure (i.e., geometry as captured by norms/similarity) uniformly over many objects
- JL provides a paradigm for probabilistic error control in random algorithms
- Other random algorithms share the same concentration foundation, but operate in different regimes of estimating functionals vs. preserving geometry
Why Does \(k\) Depend on \(M\), Not \(N\)?
- The projection dimension \(k\) depends on how many distances to preserve, not original dimension
- With 2 points: only 1 distance to preserve
- Can project to \(k = \mathrm{O}(\epsilon^{-2})\) dimensions
- A single projected distance concentrates around the true distance
- With \(M\) points: must preserve \(\binom{M}{2} = \mathrm{O}(M^2)\) distances simultaneously
- Need \(k = \mathrm{O}(\epsilon^{-2} \log(M^2/\delta))\) for all to hold with failure probability at most \(\delta\)
- The \(\log M\) factor comes from a union bound over all pairs
Why Random Projections Work: The Math
Each individual distance concentrates:
\[ {\mathbb{P}_{}\left( {\left|\|Rx\|_2^2 - \|x\|_2^2\right| > \epsilon \|x\|_2^2} \right)} \lesssim e^{-c \epsilon^2 k} \]
Union bound over \(\mathrm{O}(M^2)\) pairs: multiply failure probability by \(M^2\)
To keep total failure \(\leq \delta\): need \(e^{-c\epsilon^2 k} \cdot M^2 \leq \delta\)
Solving: \(k \gtrsim \epsilon^{-2}(2\log M + \log(1/\delta)) = \epsilon^{-2} \log(M^2/\delta)\)
Dimension \(N\) appears nowhere! Randomness “averages out” across all \(N\) coordinates
JL Preserves Fixed Sets, Not New Points
Important Limitation
JL preserves distances among a fixed set of points \(\{x_1, \ldots, x_M\}\).
It provides no guarantee for distances involving a new point \(x_{M+1}\).
- A new point would require either:
- A fresh random projection, or
- Adding it to the set and increasing \(k\) accordingly
- Implication: JL is ideal for static datasets, less so for streaming/online settings
- For adaptively chosen points, different techniques are needed (e.g., oblivious subspace embeddings)
A Taxonomy of Concentration-Based Random Algorithms
| Algorithm type | What is preserved | Economic application |
|---|---|---|
| JL / Random Projections | Pairwise geometry / inner products | High-dimensional moment inequalities |
| Hutchinson Trace | Spectral trace / quadratic forms | Variance decomposition |
| Randomized SVD / Sketching | Low-rank structure | Factor models, macro-finance |
| Stochastic Trace Estimation | Operator traces | Continuous-time asset pricing |
We now look at canonical economic applications.
Application: Kline, Saggio, and Sølvsten (2020)
- Goal: Decompose wage variance into worker and firm components
- Variance component: For coefficient vector \(\beta\), estimate \(\theta = \beta^{\top} A \beta\)
- Matrix \(A\) selects which component (e.g., worker effects, firm effects, covariance)
- Key matrices:
- Projection matrix: \(P = X(X^{\top}X)^{-1}X^{\top}\) (leverages \(P_{ii}\) for leave-out corrections)
- Bias correction: \(B = (X^{\top}X)^{-1} A\) (combines design with component selector)
- Challenge: \(P\) and \(B\) are massive - cannot form explicitly
Kline, Saggio, and Sølvsten (2020): Why Traces?
- The naive plug-in \(\hat{\theta} = \hat{\beta}^{\top} A \hat{\beta}\) is biased:
\[ \mathbb{E}[\hat{\beta}^{\top} A \hat{\beta}] = \beta^{\top} A \beta + \sigma^2 \cdot \mathrm{Tr}(B) \]
To debias: estimate \(\mathrm{Tr}(B)\) via Hutchinson’s trick with Rademacher vectors \(z_j \in \{\pm1\}^N\):
\[ \mathrm{Tr}(B) = \mathbb{E}_{z}[z^\top B z] \approx \frac{1}{m}\sum_{j=1}^m z_j^\top (B z_j) \]
- Only need one linear solve of \((X^{\top}X) (B z) = A z\) for \(B z\) per draw \(z\).
- No explicit matrix required. Use preconditioned iterative solvers for high-dimensional design matrices (see iterative methods for more)
Application: Continuous-Time Asset Pricing and Stochastic Trace
Consider a high-dimensional diffusion on state \(X_t \in \mathbb{R}^N\):
\[ dX_t = \mu(X_t)\,dt + \sigma(X_t)\,dW_t, \quad X_t \in \mathbb{R}^N, \quad dW_t \in \mathbb{R}^K\quad \text{Brownian motion} \]
- \(\mu : \mathbb{R}^N \to \mathbb{R}^N\) is the drift and \(\sigma : {\mathbb{R}}^N \to {\mathbb{R}}^{N \times K}\) is the volatility
The infinitesimal generator, \(\mathcal{A}\), for this process is
\[ \mathcal{A}f(X) = \mu(X)^\top \nabla f(X) + \frac{1}{2} {\mathrm{Tr}\left( {\sigma(X) \sigma(X)^\top\nabla^2 f(X)} \right)} \]
Hamilton-Jacobi-Bellman Equation (HJBE)
Simple HJBE for asset pricing,
\[ \rho V(X) = u(X) + \mathcal{A}V(X) = u(X) + \mu(X)^\top \nabla V(X) + \frac{1}{2} {\mathrm{Tr}\left( {\sigma(X) \sigma(X)^\top \nabla^2 V(X)} \right)}, \]
- Discount rate \(\rho > 0\)
- Utility function \(u : {\mathbb{R}}^N \to {\mathbb{R}}\)
- Subject to initial and boundary conditions/transversality
Random Algorithm for Diffusion Term
Goal: Compute \({\mathrm{Tr}\left( {\sigma(X)\sigma(X)^{\top} \nabla^2 V(X)} \right)}\)
- Direct computation is \(\mathrm{O}(N^2)\) - infeasible for large \(N\)
- Use cyclic trace trick to get \({\mathrm{Tr}\left( {\sigma(X) \sigma(X)^\top \nabla^2 V(X)} \right)} = {\mathrm{Tr}\left( {\sigma(X)^\top \nabla^2 V(X) \, \sigma(X)} \right)}\)
Hutchinson estimator: For \(z \sim \mathcal{N}(0, I_K)\), let \(w = \sigma(X) z \in \mathbb{R}^N\)
\[ {\mathrm{Tr}\left( {\sigma(X)^\top \nabla^2 V(X) \, \sigma(X)} \right)} = \mathbb{E}_{w\sim \mathcal{N}(0, \sigma(X) \sigma(X)^\top)}[w^\top \nabla^2 V(X) \, w] \]
Estimate with \(m\) samples (each with \(\mathrm{O}(N)\) cost): \[ {\mathrm{Tr}\left( {\sigma(X)^\top \nabla^2 V(X) \, \sigma(X)} \right)} \approx \frac{1}{m} \sum_{j=1}^m w_j \cdot \left(\nabla^2 V(X) \cdot w_j\right), \quad w_j \sim \mathcal{N}(0, \sigma(X) \sigma(X)^\top) \]
- \(\nabla^2 V(X) \cdot w\) is a Hessian-Vector Product (hvp) - use AD such as JAX’s hvp
Application (IN PROGRESS): Chiong and Shum (2019)
Goal: Estimate discrete-choice models with extremely high-dimensional regressors \(X^t \in \mathbb{R}^d\)
Use random-projections to reduce dimension from \(d\) to \(k \ll d\)
Estimation relies on cyclic monotonicity of choice probabilities
Cyclic Monotonicity Inequalities: For any cycle \(t_1,\dots,t_L\):
\[ \sum_{\ell=1}^L \big(X^{t_{\ell+1}}\beta - X^{t_\ell}\beta \big)^\top p^{t_\ell} \;\le\; 0. \]
This yields a finite collection of inner-product inequalities in \(\beta\).
Random Projection in Chiong and Shum (2019)
Apply a random projection \(\widetilde X^t = R X^t\), with \(k \ll d\).
- The same estimator is run on projected data
- JL-type bounds ensure that the inner products defining the inequalities are preserved with high probability
- The feasibility region of the estimator is approximately unchanged
Note
Essence: One random projection must preserve many inequalities simultaneously — this is exactly the JL regime.
References
Betancourt, Michael. 2018. “Probabilistic Computation.” https://betanalpha.github.io/assets/case_studies/probabilistic_computation.html.
Boucheron, Stéphane, Gábor Lugosi, and Pascal Massart. 2013. Concentration Inequalities: A Nonasymptotic Theory of Independence. Oxford University Press.
Chiong, Khai Xiang, and Matthew Shum. 2019. “Random Projection Estimation of Discrete-Choice Models with Large Choice Sets.” Management Science 65 (1): 256–71. https://doi.org/10.1287/mnsc.2017.2928.
Kline, Patrick, Raffaele Saggio, and Mikkel Sølvsten. 2020. “Leave-Out Estimation of Variance Components.” Econometrica 88 (5): 1859–98. https://doi.org/10.3982/ECTA16410.
Ledoux, Michel. 2001. The Concentration of Measure Phenomenon. 89. American Mathematical Society.
Vershynin, Roman. 2018. High-Dimensional Probability: An Introduction with Applications in Data Science. Vol. 47. Cambridge university press.